

Pesanan Mesin Kira Fengwang
Pada penghujung tahun 2024, kami menerima pesanan daripada pelanggan di Amerika Syarikat. Kerana pelanggan tergesa-gesa untuk memesan, dia memilih pengangkutan udara, dan kuantiti pesanan hanya dalam lingkungan inventori kami. Selepas menentukan kaedah pembayaran, harga dan kuantiti, kami akan membungkus dan menghantar mesin untuk pelanggan dalam masa yang sesingkat mungkin untuk memastikan ia dihantar kepada pelanggan tepat pada masanya.



Prinsip Asas Mesin Kira Sarung Tangan
Yang automatik mesin mengira sarung tangan adalah konsisten dengan kelajuan barisan pengeluaran sarung tangan. Apabila sarung tangan dihasilkan selepas mesin pelucutan, ia ditanggalkan separuh, dan kemudian model tangan melepasi mesin pengiraan. Sarung tangan ditanggalkan sepenuhnya dan disusun dengan kemas mengikut nombor yang ditetapkan terlebih dahulu.
Mesin pengiraan automatik Fengwang boleh secara automatik menggenggam sarung tangan pada bahagian atas model tangan, hanya satu sarung tangan dikodkan untuk memudahkan pengiraan, dan kelajuan sarung tangan kod adalah konsisten dengan kelajuan barisan pengeluaran sarung tangan. Bagaimana ia berfungsi?

Video Cara Mesin Kira Sarung Tangan Automatik Berfungsi
1. Apabila bekas sarung tangan yang ditanggalkan separuh melepasi mesin penyusun sarung tangan, pengapit manipulator mula mencengkam sarung tangan dan menyusunnya dengan kemas. Kiraan sensor meningkat sebanyak 1 untuk setiap sarung tangan yang dipegang.
2. Secara amnya, setiap 100 sarung tangan disusun ke dalam timbunan, dan apabila pengapit manipulator meraih 100 kali, sarung tangan yang dilipat dan dikira di atas meja pengambilan dipindahkan secara automatik kepada pekerja oleh tali pinggang penghantar untuk proses pembungkusan seterusnya. Aliran kerja di atas dikawal oleh mikrokomputer PLC.
Operasi keseluruhan hampir bebas ralat, tetapi terdapat pengecualian. Sebagai contoh, pengapit manipulator tidak menangkap sarung tangan yang disusun pada tali pinggang penghantar mesin pengira. Skrin sentuh tidak menambah bilangan sarung tangan. Bilangan sarung tangan sebenar pada skrin sentuh ialah bilangan sarung tangan yang diambil oleh mesin pengiraan.
Kelebihan Mesin Kira Sarung Tangan
- Gunakan program PLC dengan kawalan automatik dan manual dalam dua mod, dan operasinya mudah dan mudah difahami.
- Saiz yang agak kecil dan tidak mengambil banyak ruang.
- Pengiraan stabil: 80-150 keping/kotak boleh ditetapkan sewenang-wenangnya jika kelajuan membenarkan, dan nombor yang ditetapkan boleh dicapai ±1.
- Kelajuan menggenggam dan kelajuan mengira mesin pengira boleh direka bentuk mengikut keperluan pelanggan.
Jenis I boleh menyesuaikan diri dengan kelajuan 5 sarung tangan pada satu masa: 160 sarung tangan/minit. Jenis II boleh menyesuaikan diri dengan kelajuan 6 sarung tangan pada satu masa: 200 sarung tangan/minit
- Pengapit manipulator mencengkam sarung tangan, yang mempunyai tahap perlindungan keselamatan yang tinggi untuk sarung tangan dan tidak akan menggaru sarung tangan.

- Kos penyelenggaraan yang rendah, menjimatkan masa dan usaha.
- Bunyi mesin pengira sarung tangan <40dB, penjimatan tenaga, dan perlindungan alam sekitar.
- Ia menyelesaikan masalah kadar ralat yang tinggi dan kos tinggi sarung tangan mengira manual tradisional, meningkatkan kecekapan pengeluaran sarung tangan, dan mengurangkan kos pengeluar sarung tangan.
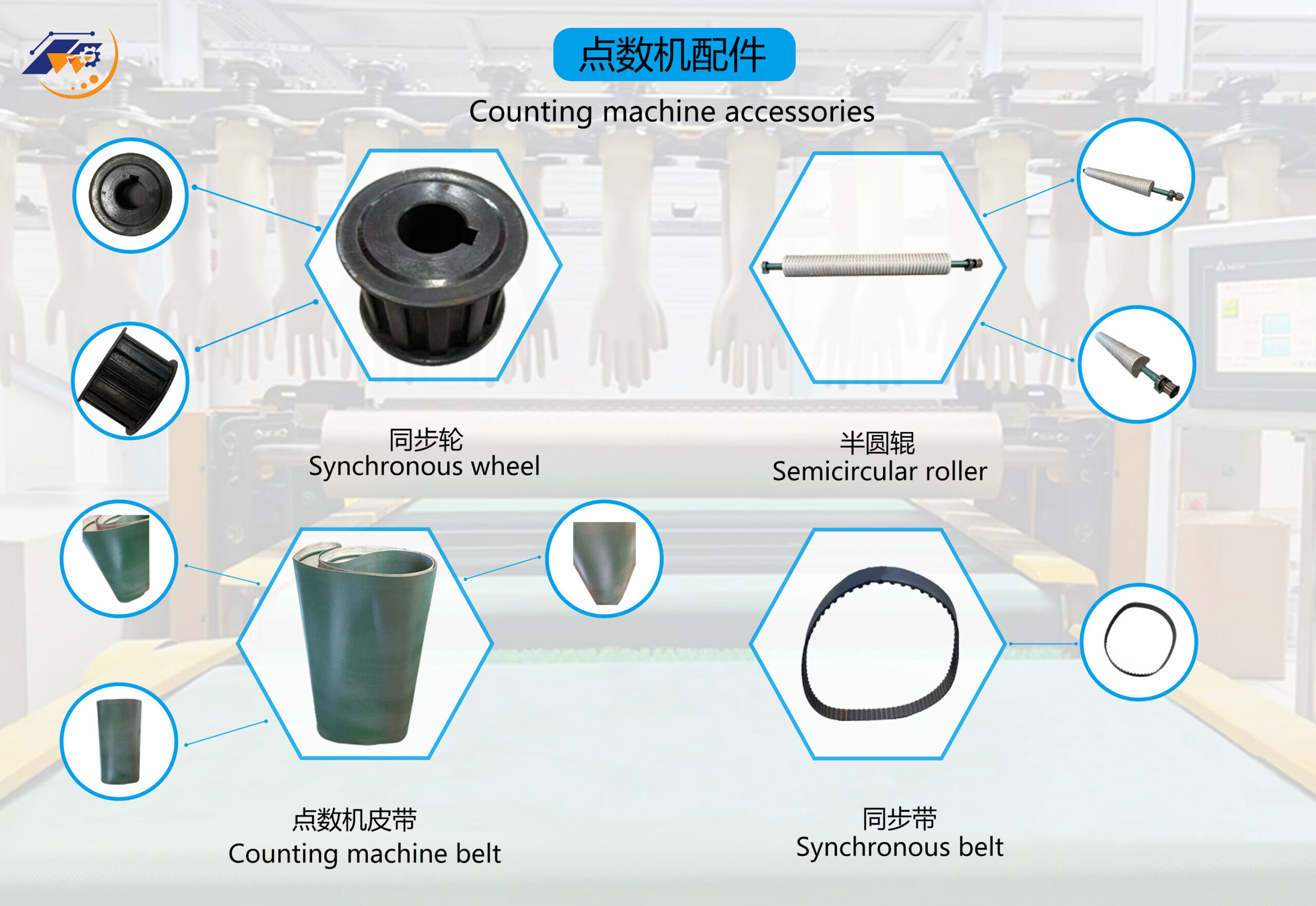
Struktur Mesin Kira Sarung Tangan
Bahagian elektrik terutamanya terdiri daripada PLC, skrin sentuh, motor servo, dan sensor fotoelektrik.
Setiap kali mengambil spesifikasi sarung tangan: 4, 5, 6 (boleh disesuaikan)
Mengenai Penimbunan Sarung Tangan
Secara umum, sarung tangan disusun dengan kemas pada tali pinggang penghantar mesin pengira, tetapi terdapat pengecualian. Apabila fenomena berikut berlaku, adalah perlu untuk mengekalkan mesin pengiraan dalam masa.
1. Apabila sarung tangan ditanggalkan sepenuhnya, ia digulung, iaitu, sarung tangan tidak rata pada tali pinggang. Terdapat dua sebab untuk ini:
Kelajuan guling separuh bulatan terlalu cepat, dan kelajuan tindak balas tali pinggang positif dan negatif adalah perlahan apabila sarung tangan dijatuhkan, jadi kelajuan gulungan separuh bulatan dikurangkan.
Tali pinggang positif dan negatif bertindak balas terlalu cepat, menyebabkan tali pinggang penghantar memasuki jarak dan jarak ke belakang tidak dapat memenuhi panjang sarung tangan. Kita harus meningkatkan masa tunda untuk pengambilalihan penghantar.

2. Bahagian depan atau belakang sarung tangan tidak berada di tempatnya:
Pertama sekali, pastikan anda mengesahkan bahawa tetapan jarak hadapan dan jarak belakang dalam tali pinggang penghantar adalah konsisten.
Kedua, perhatikan ketinggian gulungan separuh bulatan dan tali pinggang positif dan negatif.
Kemudian lihat sama ada panjang sarung tangan yang ditanggalkan oleh mesin pelucutan adalah sama. Jika ketinggian separuh bulatan tidak sesuai dengan ketinggian jalur positif dan negatif, kita perlu melaraskan ketinggian jalur positif dan negatif, ketinggian awal jalur positif dan negatif, dan ketinggian suis tutup melalui bit had atas.